Research
Dr. Hassan Zargarzadeh
Associate Professor

Robotics and Intelligent Control Systems (RICS) Lab
Robotics and Intelligent Control Systems (RICS) lab is located in Lucas Engineering Building 125. The mission of the lab is to focus on promoting robotics at undergraduate level and contributing to advanced robotics design and control at graduate level. We also have ongoing research on the advanced control methods for uncertain nonlinear systems. The area of research at RICS lab includes (but is not limited to) the following:
- Mechatronics and Robotics
- Advanced Control Systems such as Neural Networks, Adaptive Control, and Robust Control
- Power Electronics and Power Systems
Multi-agent Robotic Systems
Researchers at RICS Lab work on path planning of multi-agant robotic systems which consist of a multiple numbers of mostly simple physical robots. We study the behaviors that emerges from the interactions between the robots and interactions of robots with the environment. The challenge in this field of robotics is precise localization of the robots. To address this issue, Robotics and Intelligent Control Systems Lab (RICS) is recently been equipped with a motion analysis system that comprises high speed/resolution IR cameras and switching mechanism. The following video shows a swarm of drones performing a 3D formation maneuver using this system at RICS Lab. The ultimate goal for this system is to implement advanced path planning methods using the game theory.
A Robotic Solution to Detect Invasive Lionfish
The Red Lionfish is a recognized invasive species of the Gulf of Mexico (GOM) along with the Caribbean Sea and the coastal waters of the US Atlantic seaboard. It has been shown that invasive species are a worldwide threat to ecosystems and that they can have significant effects on predation and the competition for prey and habitat that leads to declines in abundance and persity, possibly extinction, of native organisms. In this project we investigate the efficacy of automated marine drones in survey of the extent of encroachment in the Gulf of Mexico by the lionfish. Remediation of lionfish will improve fisheries given that the invasive species disrupts the food chain of native fishes currently being harvested both recreationally and commercially. Additionally, the project seeks to investigate the level of advantage of an automated underwater drone serving in a co-robot (assistive) role. The assistive robot can improve SCUBA equipped spear fishermen’s catch volume given restrictions on bottom time limits during lionfish hunts. In this project RICS Lab is joint with the Invasive Species and Environmental Monitoring Robotics Lab Directed by Dr. Harley Myler.
The video below is a demonstration on the current results of the project provided by Mahdi Naddaf Shargh who is pursuing his doctorate degree at RICS Lab with the LUEE department.
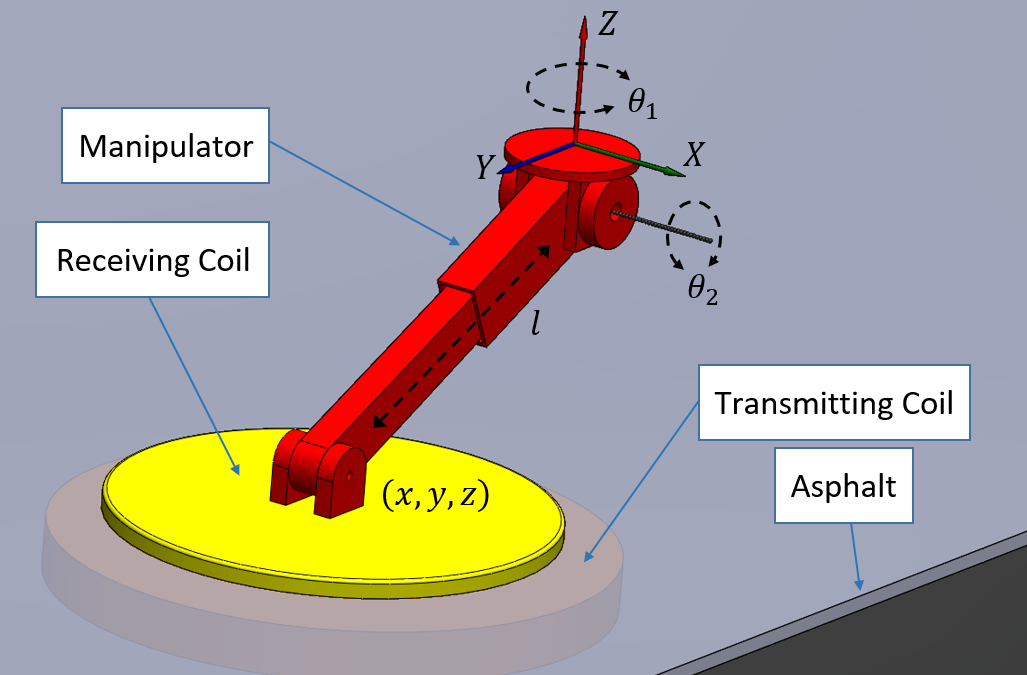
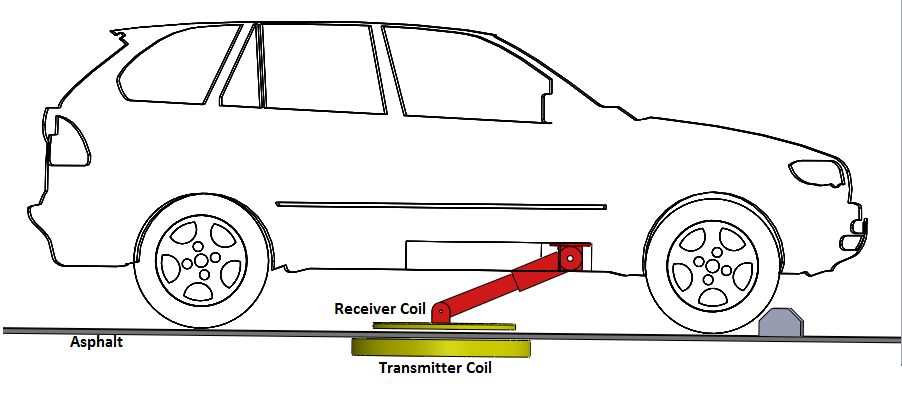
A Robotic Solution for Efficient Charging of Wireless Electric Vehicles
Charging time and power transfer efficiency are the main challenges of wireless power transfer for electric vehicles. It is proposed in this project to resolve both of the issues using the concept of transformer induction. To this end, an autonomous robotic arm equipped with several sensors is mounted to the vehicle’s undercarriage that carries a receiving coil. In case that the vehicle is parked in a parking spot equipped with wireless power transmitters, the robot will locate the receiving coil on the right place which is above the transmitting core when the vehicle is parked. When the vehicle is driven on a road equipped with the wireless power transmission system, the proposed mechanism provides the driver with signals that indicate the most efficient driving trajectory. To achieve the maximum efficiency, an advanced mathematical adaptive algorithm based on the extremum seeking method will be employed. This is a collaborative effort between RICS Lab, Lamar Renewable Energy Microgrid Laboratory (LAREM) directed by Dr. Barzegaran, Dr. Guduru's research group (Mechanical Engineering Department), and Lamar University Material and Structures Lab directed by Dr. Brake (Civil Engineering Department). Below are some conceptual pictures that demonstrate the main idea of this project.
Design and Control of an Innovative Spherical Robot
Spherical robots are self-propelled ball-shaped robots which can freely rotate in any direction and be stable in any position. Due to their shape, these robots have a complete symmetry and a soft, safe, and friendly look without any sharp corners or protrusions. This feature makes spherical robots a great candidate to serve as assistive robots to deal with people. The principle of motion for spherical robots is usually based upon shifting the ball’s center of gravity inside the spherical shell. An undergraduate senior design team at RICS Lab, are developing an innovative spherical robot that is more maneuverable in dynamics and more cost efficient in terms of manufacturing. Due to the novel mechanical design, a group of graduate students are also investigating the dynamics and advanced control methods for this robot. Below is a 3D animation of how the robot is going to be built and how it propels itself on straight and curved tracks.
Undergraduate senior design team members: Jesus Diaz, Angel Rodriguez, and Jordan Johnson.
Advanced Vision-Based Motion Control of a Hexapod Robot
Hexapods (also referred as six-legged mobile robots), while very complex in locomotion patterns, have the advantage of moving on terrains where the wheeled robots fail. The objective of this project is to give a hexapod the ability to use a camera to autonomously follow a track or an object on the ground distinguished by its color. We use MATLAB/Simulink to program the robot. Eventually, to avoid data and power tether lines, the code will be loaded on a micro-computer board carried by the hexapod. Below is a video on the preliminary results of the project.
Graduate students involved in this project: Shahriar Ahmad and Mahdi Naddaf.